Корейські інженери навчили чотириногого робота "ходити по стінах" за допомогою магнітів (відео)
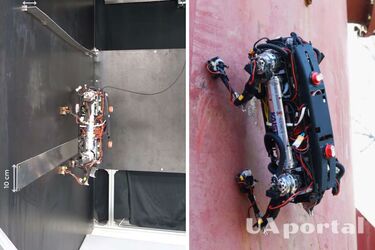
Команда інженерів з Кореї навчила робота вилізати на металеві вертикальні поверхні приладнавши магніти до його ніг, щоб робот міг самостійно вилазити на стіну чи стелю з горизонтального положення, долати перешкоди та навіть нести на собі 3 кг вантажу.
Вчені з KAIST спільно з колегою з Іллінойського університету в Урбана-Шампейн опублікували свою статтю в журналі Science Robotic, цей робот навіть потрапив на обкладинку. Робота, який важить 8 кілограм, назвали MARVEL (magnetically adhesive robot for versatile and expeditious locomotion).
Головні історії дня
Чотириногі роботи вже вміють бігати, носити на собі значні вантажі та навіть плавати. А оскільки більшість промислових середовищ, де такий робот міг би використовуватись – металеві, вчені вирішили прикріпити робота до поверхні магнітами на кінцівках.
Магніт в стопах робота намагнічується через зміну напруги, а також має подушечки з магніточутливого еластомера, який не знизить сили зчеплення та допоможе роботу не підсковзнутися на поверхні.
Робот MARVEL зміг розвинути швидкість до 0,5 м\с на стінах, а також зміг подолати декілька перешкод, наприклад, перелізти через бар'єр висотою в 5 сантиметрів та переступити через панель шириною у 10 сантиметрів. MARVEL зможе видертися на стіну із 2 кг навантаження, а на стелю – з 3 кг.
Вчені також випробували робота на справжньому резервуарі для зберігання, покритому шаром фарби.
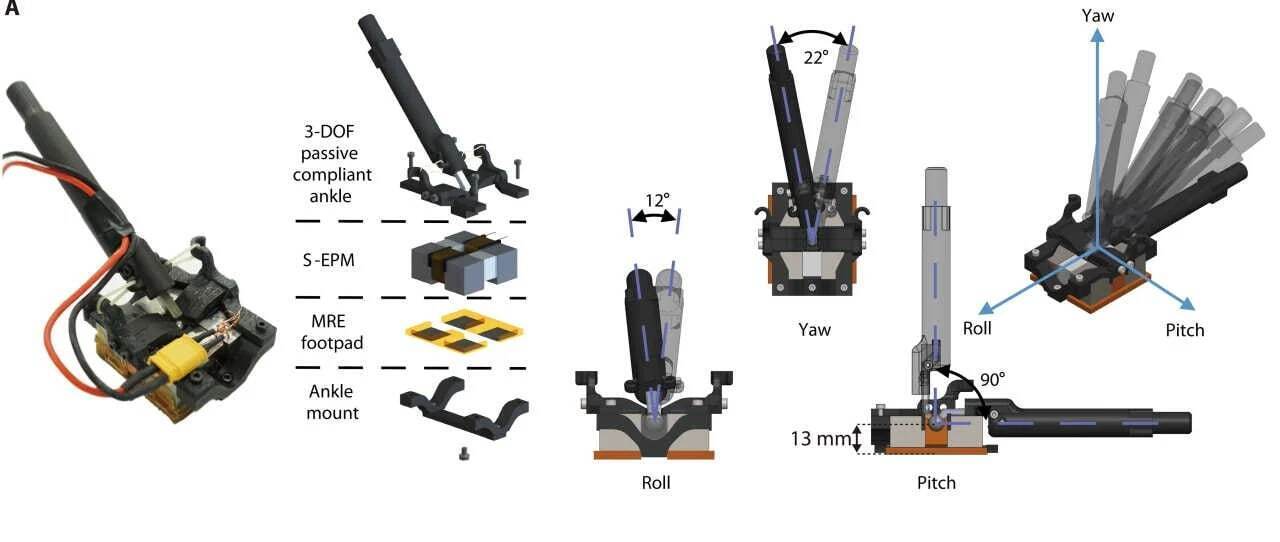
На кожен примагнічений крок MARVEL необхідно 5 мілісекунд для перемикання магніта. Заряду батареї магнітів вистачить на 2 781 крок. Незалежно від поверхні, якою рухається робот, він використовує один контролер, який контролює план руху, відстежує положення робота, а також стежить за положенням стоп, щоб керувати їх перемагнічуванням.
Раніше вчені з Китаю продемонстрували спосіб, який дозволить поставити будь-якого чотириногого робота на дві ноги.
Бажаєте отримувати найактуальніші новини про війну та події в Україні – підписуйтесь на наш Телеграм-канал!