Корейские инженеры научили четырехногого работа "ходить по стенам" с помощью магнитов (видео)
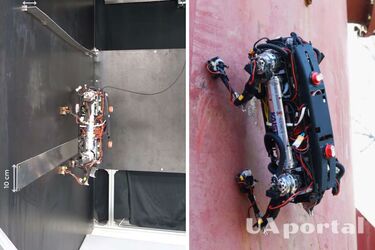
Команда инженеров из Кореи научила робота вылезать на металлические вертикальные поверхности, приладив магниты к его ногам, чтобы робот мог самостоятельно вылезать на стену или потолок из горизонтального положения, преодолевать препятствия и даже нести на себе 3 кг груза.
Ученые из KAIST совместно с коллегой из Иллинойского университета в Урбана-Шампейне опубликовали свою статью в журнале Science Robotic, этот робот даже попал на обложку. Работа, весящая 8 килограмм, назвали MARVEL (magnetically adhesive robot для versatile and expeditious locomotion).
Главные истории дня
Четырехногие работы уже умеют бегать, носить на себе значительные грузы и даже плавать. А поскольку большинство промышленных сред, где такой робот мог бы использоваться – металлические, ученые решили прикрепить работу к поверхности магнитами на конечностях.
Магнит в стопах работа намагничивается из-за изменения напряжения, а также подушечки из магниточувствительного эластомера, который не снизит силы сцепления и поможет работу не подскользнуться на поверхности.
Робот MARVEL смог развить скорость до 0,5 мс на стенах, а также смог преодолеть несколько препятствий, например, перелезть через барьер высотой в 5 сантиметров и переступить через панель шириной в 10 сантиметров. MARVEL сможет взобраться на стену с 2 кг нагрузки, а на потолок – с 3 кг.
Ученые также опробовали работу на настоящем резервуаре для хранения, покрытом слоем краски.
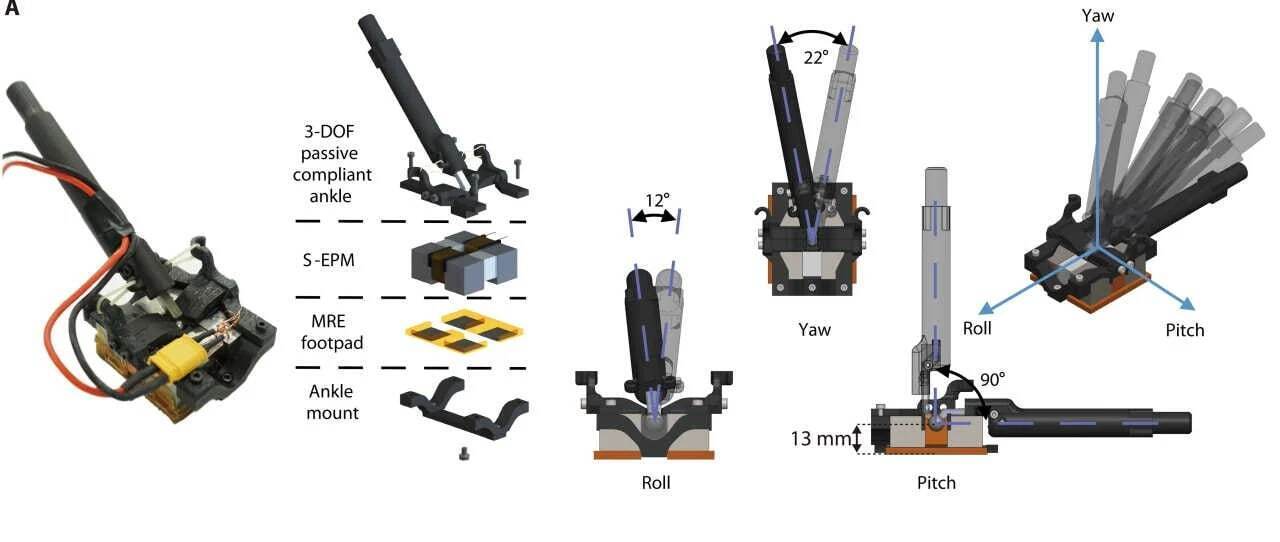
На каждый примагниченный шаг MARVEL необходимо 5 миллисекунд для переключения магнита. Заряда батареи магнитов хватит на 2781 шаг. Независимо от поверхности, по которой двигается робот, он использует один контроллер, который контролирует план движения, отслеживает положение робота, а также следит за положением стоп, чтобы управлять их перемагничиванием.
Ранее ученые из Китая продемонстрировали способ, который позволит поставить любого четырехногого робота на две ноги.
Хотите получать самые актуальные новости о войне и событиях в Украине – подписывайтесь на наш Телеграмм-канал!