Вчені розробили робота-кентавра, який може підіймати вагу, більшу за власну (відео)
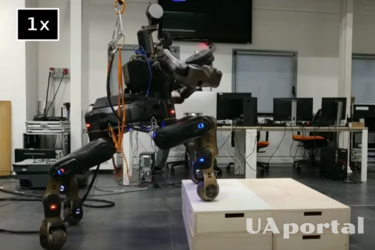
Італійські інженери продемонстрували як чотириногий робот-кентавр навантажений вагою у 17 кг, що на 15 відсотків більша за його власну, піднявся на платформу висотою у 0,3 метра.
Його презентували на конференції IEEE-RAS International Conference on Humanoid Robots, яка присвячена людиноподібним роботам. Стаття про робота-кентавра і його підхід до планування руху доступна на arXiv. Чотириногий робот-кентавр має дві "руки", до яких прикріпили вантаж по 8,5 кілограма. А ця вага, між іншим, на 15,1 відсотка перевищує масу робота та на 85 відсотків кожної його руки.
Головні історії дня
Він зміг скоординувати свої рухи так, щоб піднятися із вантажем на платформу висотою у 0,3 метра, що вже є серьйозною перепоною для такого завдання. Робот має колеса на ногах, хоча може і крокувати ними, а не їздити.
Такої стійкості від робота вдалося добитися інженерам з Італійського технологічного інституту завдяки новій моделі планування руху. Попри популярність чотириногих роботів завдяки їхній стійкості та можливості тягати значні вантажі, вони все ж мають труднощі із контролем власного руху, перерозподілом навантаження, а також часто не можуть одночасно вправлятися і з рухом своїх ніг, і з маніпуляціями зі своїми кінцівками. При цьому
Автори цієї роботи знайшли спосіб її спростити алгоритми одночасного планування руху і маніпулювання предметами, які є доволі складною задачею для інженерів.
Їхня ідея полягає в тому, щоб система планування знала, яке саме навантаження має переносити робот, і відповідно до цього відстежувала стабільність його руху за центром мас та положенням його рук.
Тобто контролер тіла робокентавра отримує інформацію про центр мас і про положення рук робота, які вже мають корисне навантаження, та на основі цього генерує траєкторії для суглобів робота, які приведуть його в рух.
Таким чином ходьбу робота, тобто його кроки, мають підлаштовувати заздалегідь відповідно до даних про вантаж. Як пишуть дослідники, їхній підхід можна перенести і на інших чотириногих.
Раніше: Американські інженери показали чотириногого робота-воротаря (відео)
Бажаєте отримувати найактуальніші новини про війну та події в Україні – підписуйтесь на наш Telegram-канал!