Ученые разработали робота-кентавра, который может поднимать вес больше собственного (видео)
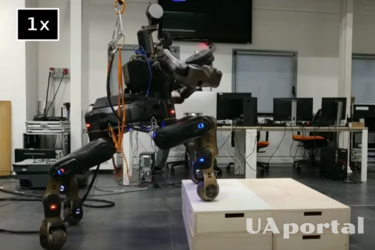
Итальянские инженеры продемонстрировали как четвероногий робот-кентавр груженый весом в 17 кг, что на 15 процентов больше его собственной, поднялся на платформу высотой в 0,3 метра.
Его презентовали на конференции IEEE-RAS International Conference on Humanoid Robots, посвященной человекоподобным работам. Статья о робота-кентавре и его подходе к планированию движения доступна на arXiv. Четырехногий робот-кентавр имеет две "руки", к которым прикрепили груз по 8,5 килограмма. А этот вес, между прочим, на 15,1 процента превышает массу работы и на 85 процентов каждой его руки.
Главные истории дня
Он смог скоординировать свои движения так, чтобы подняться с грузом на платформу высотой в 0,3 метра, что уже является серьезным препятствием для такой задачи. Робот имеет колеса на ногах, хотя может и шагать по ним, а не ездить.
Такую устойчивость от работа удалось добиться инженерам из Итальянского технологического института благодаря новой модели планирования движения. Несмотря на популярность четвероногих роботов благодаря их устойчивости и возможности таскать значительные грузы, они все же испытывают трудности с контролем собственного движения, перераспределением нагрузки, а также часто не могут одновременно справляться и с движением своих ног, и с манипуляциями со своими конечностями. При этом
Авторы этой работы нашли способ ее упростить алгоритмы одновременного планирования движения и манипулирования предметами, достаточно сложной задачей для инженеров.
Их идея состоит в том, чтобы система планирования знала, какую нагрузку должна переносить робот, и в соответствии с этим отслеживала стабильность его движения по центру масс и положению его рук.
То есть контроллер тела робокентавра получает информацию о центре масс и о положениях рук робота, уже имеющих полезную нагрузку, и на основе этого генерирует траектории для суставов робота, которые приведут его в движение.
Таким образом, ходьбу робота, то есть его шаги, должны подстраивать заранее в соответствии с данными о грузе. Как пишут исследователи, их подход можно перенести и на других четвероногих.
Ранее: Американские инженеры показали четвероногого робота-вратаря (видео)
Хотите получать самые актуальные новости о войне и событиях в Украине – подписывайтесь на наш Telegram-канал!